Raspberry Pi - Premiers pas avec pigpio
Sur Raspberry Pi, la gestion des entrées/sorties (GPIO) est souvent le premier point de contact avec le monde matériel. Parmi les nombreuses solutions disponibles, pigpio et son démon pigpiod se distinguent par leur précision, leur stabilité et leur polyvalence.
Cet article propose une prise en main progressive de pigpiod, en commençant par des opérations simples de lecture et d’écriture sur les GPIO, avant d’aborder l’utilisation du port série et du bus I²C, afin de fournir une base solide pour des projets matériels fiables et évolutifs.
Sommaire
- pigpio et pigpiod : principes de fonctionnement
- Installation et démarrage de pigpiod
- Attention aux différentes APIs pigpio
- Test : le traditionnel BLINK
- Lecture d’une GPIO (bouton poussoir)
- PWM précis (LED ou moteur)
- Callbacks et interruptions
- Communication UART (port série)
- Référence
- Articles connexes
pigpio et pigpiod : principes de fonctionnement
- pigpio : Bibliothèque utilisée par le code pour accéder aux GPIO
- pigpiod : Démon central qui gère l’accès aux GPIO et aux interfaces matérielles
Avantages du démon
- Pas besoin de sudo pour chaque programme
- Plusieurs programmes peuvent accéder aux GPIO simultanément
- Possibilité de contrôle à distance via le réseau
Installation et démarrage de pigpiod
Installation
sudo apt-get update
sudo apt-get install pigpiod pigpio-tools libpigpio-devDémarrage automatique au boot
sudo systemctl enable pigpiod
sudo systemctl start pigpiod
Vérification
systemctl status pigpiodAttention aux différentes APIs pigpio
Pigpio fournit plusieurs interfaces C aux signatures proches mais incompatibles :- "pigpio.h" : Accès direct, nécessite sudo
- pigpiod_if.h : Bibliothèque historique, utilise le démon, Connexion globale implicite, limité
- pigpiod_if2.h : version moderne, utilise le démon, c'est la version recommandée, robuste, concurrent
Test : le traditionnel BLINK
Câblage de la LED sur le Raspberry Pi
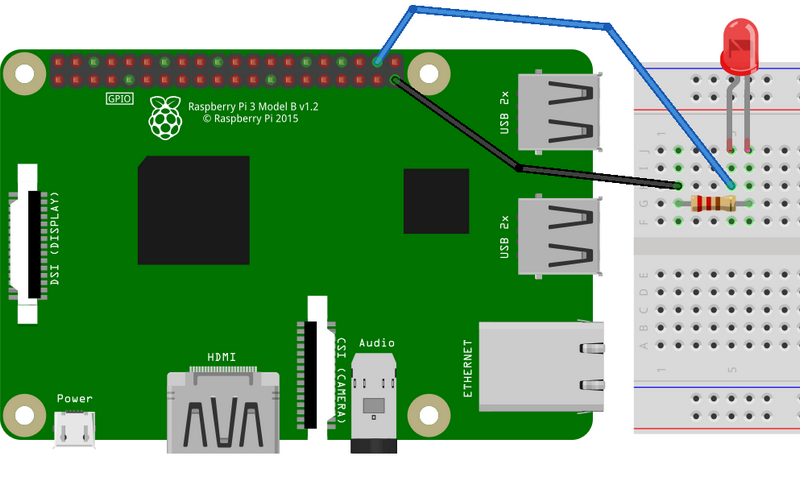
Remarques sur le câblage
- Attention au sens de la LED
- La résistance peut avoir une valeur entre 220Ω et 330Ω
Code en langage C
#include <stdio.h>
#include <pigpiod_if2.h>
#define LED_GPIO 20 // GPIO20 (BCM)
int main(void)
{
int pi;
// Connexion au démon pigpiod
pi = pigpio_start(NULL, NULL);
if (pi < 0) {
printf("Erreur : impossible de se connecter à pigpiod\n");
return 1;
}
// Configuration GPIO "LED_GPIO" en sortie
set_mode(pi, LED_GPIO, PI_OUTPUT);
printf("Blink pigpiod sur GPIO %d\n", LED_GPIO);
for (int i = 0 ; i < 10 ; i++) {
gpio_write(pi, LED_GPIO, 1); // LED ON
time_sleep(0.5);
gpio_write(pi, LED_GPIO, 0); // LED OFF
time_sleep(0.5);
}
// Fermeture de la connexion
pigpio_stop(pi);
return 0;
}Important : La variable "pi" représente la connexion au démon. Elle doit être passée en paramètre à toutes les fonctions de l’API.
Compilation et lancement
gcc blink.c -o blink -lpigpiod_if2 -lrt -pthread
./blinkAttention à bien mettre "lpigpiod_if2" et non pas "lpigpiod_if".
Lecture d’un GPIO (bouton poussoir)
Câblage du bouton et de la LED sur le Raspberry Pi
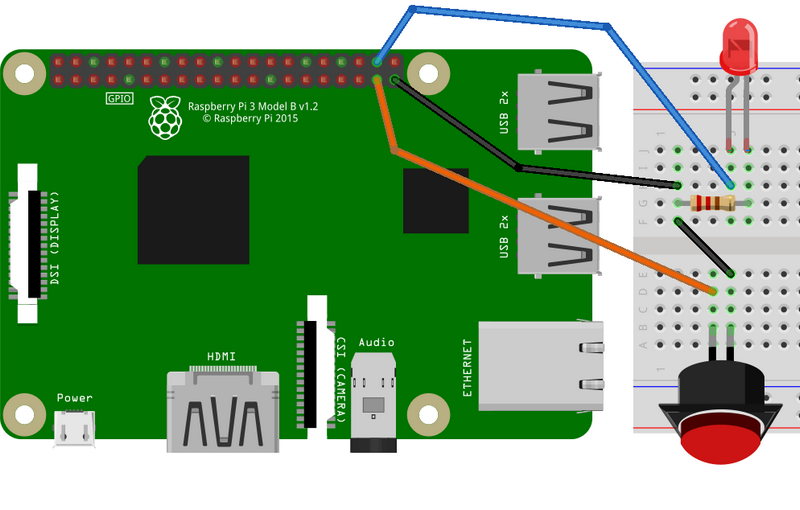
Remarques sur le câblage
- Le bouton est relié à la masse, le Raspberry Pi lira donc un '0' logique quand le bouton sera appuyé et '1' lorsqu'il sera relâché
- Il n'y a pas de résistance de pull-up externe pour le bouton, il faudra donc activer la pull-up interne dans le programme
Code en langage C
Exemple : lecture d’un bouton sur GPIO 26
#include <stdio.h>
#include <pigpiod_if2.h>
#define BUTTON_GPIO 26
#define LED_GPIO 20
int main(void)
{
// Connexion au démon pigpiod
int pi = pigpio_start(NULL, NULL);
if (pi < 0) return 1;
// Configuration GPIO "BUTTON_GPIO" en entrée
set_mode(pi, BUTTON_GPIO, PI_INPUT);
// Configuration GPIO "LED_GPIO" en sortie
set_mode(pi, LED_GPIO, PI_OUTPUT);
// Configure une résistance de pullup interne au Raspberry PI
// Inutile si vous avez une résistance de pullup externe
set_pull_up_down(pi, BUTTON_GPIO, PI_PUD_UP);
printf("Lecture état GPIO %d et recopie sur GPIO %d\n", BUTTON_GPIO, LED_G>
while (1) {
// Lecture bouton
int level = gpio_read(pi, BUTTON_GPIO);
// Recopie sur LED et affichage
gpio_write(pi, LED_GPIO, level);
printf("Bouton : %d\n", level);
time_sleep(0.2);
}
// Fermeture de la connexion
pigpio_stop(pi);
return 0;
}Compilation et lancement
gcc lecture_gpio.c -o lecture_gpio -lpigpiod_if2 -lrt -pthread
./lecture_gpioPWM précis (LED ou moteur)
Pigpio permet de générer des signaux PWM matériels très précis, idéal pour contrôler :
- la luminosité d’une LED
- la vitesse d’un moteur à courant continu
Dans cet exemple nous utiliserons une LED. Le câblage est identique aux précédents : la LED est connecté sur la GPIO 20.
Code en langage C
#include <stdio.h>
#include <pigpiod_if2.h>
#define LED 20
int main(void)
{
// Connexion au démon pigpiod
int pi = pigpio_start(NULL, NULL);
if (pi < 0)
{
printf("Erreur : impossible de se connecter à pigpiod\n");
return 1;
}
// Réglage fréquence PWM
int freq = set_PWM_frequency(pi, LED, 500); // 500 Hz
printf("Fréquence PWM réelle : %d Hz\n", freq);
// Configuration GPIO "LED" en sortie
set_mode(pi, LED, PI_OUTPUT);
// Augmentation progressive de l'intensité dans la LED
for (int duty = 0 ; duty <= 255 ; duty++) {
set_PWM_dutycycle(pi, LED, duty); // Valeur 0-255
time_sleep(0.02);
}
// Ralentir et éteindre
for (int duty = 255; duty >= 0; duty--) {
set_PWM_dutycycle(pi, LED, duty);
time_sleep(0.02);
}
set_PWM_dutycycle(pi, LED, 0);
// Fermeture de la connexion
pigpio_stop(pi);
return 0;
}Remarques :
- la PWM matériel fonctionne mieux sur certaines GPIO (12, 13, 18, 19 sur Raspberry Pi)
- La fréquence demandée n’est pas toujours exactement celle obtenue, pigpio choisit la fréquence la plus proche possible, Le retour de set_PWM_frequency() est la vraie fréquence appliquée
- La résolution par défaut est de 250, elle peut être modifiée (entre 25 et 20000) avec la fonction "int set_PWM_range(unsigned user_gpio, unsigned range)" (voir documentation sur le site de pigpio)
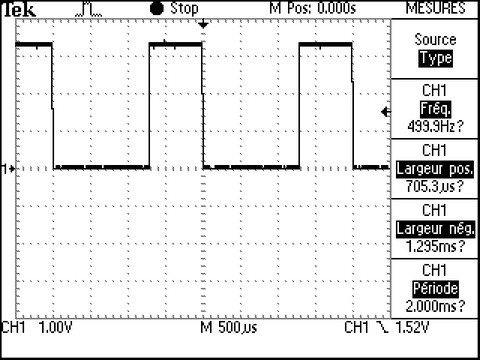
Signal PWM obtenu généré par pigpio
Relevé du signal obtenu (à un instant t, le rapport cyclique étant variable au cours de l'exécution du programme) à l'oscilloscope :
Callbacks et interruptions
Il est possible de détecter les changements d'états sur les GPIO configurées en entrées (détection de fronts) et de déclencher automatiquement l'appel d'une fonction (callback). Ceci est très utile pour éviter d'avoir à tester l'état des entrées en permanence dans la boucle principale du programme et permet ainsi de gagner tu temps CPU.
Dans cet exemple nous utiliserons une LED et un bouton poussoir. Le câblage est identique aux précédents : la LED est connecté sur la GPIO 20 et le bouton poussoir sur la GPIO 26.
#include <stdio.h>
#include <pigpiod_if2.h>
#define BUTTON 26
#define LED 20
// Code de la fonction de callback
// Cette fonction est appelée de manière asynchrone lorsque qu'un front
// est détecté sur la GPIO concernée
void button_callback(int pi, unsigned gpio, unsigned edge, uint32_t tick) {
// Allume la LED si front montant
if (edge == 1) {
gpio_write(pi, LED, 1);
} else { // Sinon extinction de la LED
gpio_write(pi, LED, 0);
}
// Affiche les paramètres reçus par la fonction (pour info, à supprimer dans un "vrai" programme
printf("Front détecté : button_callback : gpio = %d - edge = %d - tick = %d", gpio, edge, tick);
}
int main(void) {
// Connexion au démon pigpiod
int pi = pigpio_start(NULL, NULL);
if (pi < 0)
{
printf("Erreur : impossible de se connecter à pigpiod\n");
return 1;
}
// Configuration GPIO "BUTTON" en entrée et activation pull-up interne
set_mode(pi, BUTTON, PI_INPUT);
set_pull_up_down(pi, BUTTON, PI_PUD_UP);
// Configuration GPIO "LED" en sortie
set_mode(pi, LED, PI_OUTPUT);
// Chaque front sur l'entré BUTTON déclechera l'appel
// de la fonction "button_callback"
int callback_id = callback(pi, BUTTON, EITHER_EDGE, button_callback);
if(callback_id < 0)
{
printf("Erreur : impossible de créer la callback\n");
return 1;
}
while (1) {
time_sleep(1); // boucle principale libre
}
// Fermeture de la connexion
pigpio_stop(pi);
return 0;
}
Remarques
- Les GPIO sont échantillonnées à une vitesse définie quand le démon est démarré (5 us par défaut)
- Les changements de niveau de durée inférieure à la vitesse d'échantillonnage peuvent ne pas être détectés
- Le paramètre "edge" de la fonction "callback" peut être : RISING_EDGE, FALLING_EDGE, ou EITHER_EDGE
Description des paramètres reçus par la fonction de callback "button_callback"
La fonction de callback (button_callback dans notre cas) reçoit 4 paramètres :
- pi : valeur retournée par pigpio_start
- gpio : Le numéro de la GPIO (0 à 31) qui a déclenché l'appel de la callback
- edge : Le type front qui a déclenché l'appel de la callback :
- 0 = Front descendant
- 1 = Front montant
- 2 = Pas de changement, déclenchement par timeout (watchdog)
- tick : Le nombre de µs écoulées depuis le boot, ATTENTION : revient à 0 toutes les 72 minutes (débordement de la variable 32 bits). Cette valeur peut être utilisée pour réaliser un anti-rebond par exemple.
Pour aller plus loin
La fonction callback_ex()
La version étendue callback_ex() permet de passer un paramètre userdata à la fonction callback, ce qui est pratique pour structurer du code plus complexe ou utiliser plusieurs boutons sans variables globales (voir documentation officielle de pigpio).
Exemple de gestion anti-rebond
La fonction de callback serait modifiée ainsi :
void button_callback(int pi, unsigned gpio, unsigned edge, uint32_t tick) {
static uint32_t lastTick = 0;
if(tick - lastTick > 20000) // anti-rebond de 20ms
{
lastTick = tick;
// Allume la LED si front montant
if (edge == 1) {
gpio_write(pi, LED, 1);
} else { // Sinon extinction de la LED
gpio_write(pi, LED, 0);
}
}
// Affiche les paramètres reçus par la fonction (pour info, à supprimer dans un "vrai" programme
printf("Front détecté : button_callback : gpio = %d - edge = %d - tick = %d", gpio, edge, tick);
}Référence
Articles connexes
- Raspberry Pi - Le port série avec pigpio
- Raspberry Pi - Installer une image de système d'exploitation (maj 2022)
- Développer en C/C++ sur Raspberry Pi à distance depuis VsCode
- Installer et utiliser Raspbian sur Raspberry Pi sans écran et sans clavier (sur la Pi)
- Raspberry Pi - Quelques astuces pour obtenir des renseignements sur votre Pi
- Tous les articles sur le Raspberry Pi